OpenModelica
License
https://openmodelica.org/useresresources/license/
- GNU AGPL Version 3.0
Installation on Linux/Ubuntu
https://openmodelica.org/download/download-linux/
sudo apt-get update sudo apt-get install ca-certificates curl gnupg
sudo curl -fsSL http://build.openmodelica.org/apt/openmodelica.asc | sudo gpg --dearmor -o /usr/share/keyrings/openmodelica-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/openmodelica-keyring.gpg] \ https://build.openmodelica.org/apt \ $(cat /etc/os-release | grep "\(UBUNTU\\|DEBIAN\\|VERSION\)_CODENAME" | sort | cut -d= -f 2 | head -1) \ stable" | sudo tee /etc/apt/sources.list.d/openmodelica.list
sudo apt update sudo apt install openmodelica
Python Interface: OMPython
https://github.com/OpenModelica/OMPython
https://qiita.com/US3/items/528aba504065e3745aa8
pip install --upgrade OMPython
Tutorials
https://openmodelica.org/doc/OpenModelicaUsersGuide/latest/ompython.html
git clone https://github.com/OpenModelica/OpenModelica
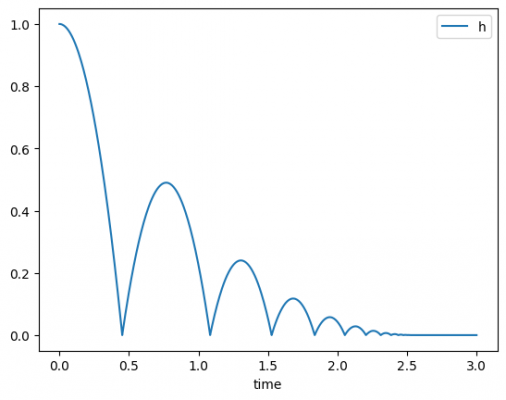
BouncingBall by OMPython
python
import pandas as pd import matplotlib import matplotlib.pyplot as plt
from OMPython import OMCSessionZMQ omc = OMCSessionZMQ()
omc.sendExpression("getVersion()")
## 'OpenModelica 1.23.1'
omc.sendExpression("installPackage(Modelica)")
omc.sendExpression("loadModel(Modelica)")
omc.sendExpression("loadFile(\"./OpenModelica/OMCompiler/Examples/BouncingBall.mo\")")
## True
omc.sendExpression("getClassNames()")
## ('BouncingBall', 'ModelicaServices', 'Complex', 'Modelica')
omc.sendExpression("instantiateModel(BouncingBall)")
## class BouncingBall
## parameter Real e = 0.7 "coefficient of restitution";
## parameter Real g = 9.81 "gravity acceleration";
## Real h(start = 1.0, fixed = true) "height of ball";
## Real v(fixed = true) "velocity of ball";
## Boolean flying(start = true, fixed = true) "true, if ball is flying";
## Boolean impact;
## Real v_new(fixed = true);
## Integer foo;
## equation
## impact = h <= 0.0;
## foo = if impact then 1 else 2;
## der(v) = if flying then -g else 0.0;
## der(h) = v;
## when {h <= 0.0 and v <= 0.0, impact} then
## v_new = if edge(impact) then -e * pre(v) else 0.0;
## flying = v_new > 0.0;
## reinit(v, v_new);
## end when;
## end BouncingBall;
omc.sendExpression("simulate(BouncingBall, stopTime=3.0, outputFormat=\"csv\")")
## {
## 'resultFile': 'BouncingBall_res.csv',
## 'simulationOptions': "startTime = 0.0, stopTime = 3.0, numberOfIntervals = 500, tolerance = 1e-6, method = 'dassl',
## fileNamePrefix = 'BouncingBall', options = '', outputFormat = 'csv', variableFilter = '.*', cflags = '', simflags = ''",
## 'messages': 'LOG_SUCCESS | info | The initialization finished successfully without homotopy method.\n
## LOG_SUCCESS | info | The simulation finished successfully.\n',
## 'timeFrontend': 0.067590884,
## 'timeBackend': 0.023814135,
## 'timeSimCode': 0.004248845,
## 'timeTemplates': 0.007150218000000001,
## 'timeCompile': 1.506673157,
## 'timeSimulation': 0.035231169,
## 'timeTotal': 1.6510822539999999
## }
df = pd.read_csv("BouncingBall_res.csv")
df
## time h v der(h) der(v) v_new foo flying impact ## 0 0.000 1.000000e+00 0.00000 0.00000 -9.81 0.0 2 1 0 ## 1 0.006 9.998234e-01 -0.05886 -0.05886 -9.81 0.0 2 1 0 ## 2 0.012 9.992937e-01 -0.11772 -0.11772 -9.81 0.0 2 1 0 ## 3 0.018 9.984108e-01 -0.17658 -0.17658 -9.81 0.0 2 1 0 ## 4 0.024 9.971747e-01 -0.23544 -0.23544 -9.81 0.0 2 1 0 ## .. ... ... ... ... ... ... ... ... ... ## 687 2.982 2.101988e-11 0.00000 0.00000 0.00 0.0 1 0 1 ## 688 2.988 2.101988e-11 0.00000 0.00000 0.00 0.0 1 0 1 ## 689 2.994 2.101988e-11 0.00000 0.00000 0.00 0.0 1 0 1 ## 690 3.000 2.101988e-11 0.00000 0.00000 0.00 0.0 1 0 1 ## 691 3.000 2.101988e-11 0.00000 0.00000 0.00 0.0 1 0 1 ## ## [692 rows x 9 columns]
df.plot(x="time", y="h")
plt.savefig("BouncingBall_res.png", bbox_inches='tight')
Information - How to Debug
## Getting error messages of the previous command
omc.sendExpression("getErrorString()")
## '[<interactive>:1:1-1:0:writable] Error: Class getDummyError not found in scope <global scope> (looking for a function or record).\n'
Calling External C Functions
https://openmodelica.org/doc/OpenModelicaUsersGuide/latest/interop_c_python.html
## TCP Server in Python
vi getValue.py
================================
import socket
HOST = '127.0.0.1'
PORT = 12345
with socket.socket(socket.AF_INET, socket.SOCK_STREAM) as s :
s.bind((HOST, PORT))
s.listen()
print(f"Listening on {HOST}:{PORT}")
while True :
conn, addr = s.accept()
with conn :
print('Connected by', addr)
while True :
data = conn.recv(1024)
if not data :
break
print('Received', data.decode('utf-8'))
print('Connection closed by', addr)
================================
python getValue.py
## TCP Client in C
vi sendValue.c
================================
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <arpa/inet.h>
#include <sys/socket.h>
#include <unistd.h>
#include "sendValue.h"
int sendValue(const char *server_ip, int server_port, float value) {
int sockfd;
struct sockaddr_in server_addr;
char message[64];
snprintf(message, sizeof(message), "%f", value);
if ((sockfd = socket(AF_INET, SOCK_STREAM, 0)) < 0) {
perror("Socket creation failed");
return -1;
}
server_addr.sin_family = AF_INET;
server_addr.sin_port = htons(server_port);
if (inet_pton(AF_INET, server_ip, &server_addr.sin_addr) <= 0) {
perror("Invalid address");
close(sockfd);
return -1;
}
if (connect(sockfd, (struct sockaddr *)&server_addr, sizeof(server_addr)) < 0) {
perror("Connection failed");
close(sockfd);
return -1;
}
if (send(sockfd, message, strlen(message), 0) < 0) {
perror("Send failed");
close(sockfd);
return -1;
}
printf("Message sent: %s\n", message);
close(sockfd);
return 0;
}
================================
vi sendValue.h ================================ #ifndef SENDVALUE_H #define SENDVALUE_H int sendValue(const char *server_ip, int server_port, float value); #endif ================================
gcc -c -o sendValue.o sendValue.c
## Calling external C function sendValue() every 1 second
vi BouncingBall.mo
================================
model BouncingBall
parameter Real e=0.7 "coefficient of restitution";
parameter Real g=9.81 "gravity acceleration";
Real h(fixed=true, start=1) "height of ball";
Real v(fixed=true) "velocity of ball";
Boolean flying(fixed=true, start=true) "true, if ball is flying";
Boolean impact;
Real v_new(fixed=true);
Integer foo;
Clock c = Clock(1);
function sendValue
input String server_ip = "127.0.0.1";
input Integer server_port = 12345;
input Real value = 0.0;
external "C" sendValue(server_ip, server_port, value) annotation(Include="#include \"sendValue.h\"", Library="sendValue.o");
end sendValue;
equation
impact = h <= 0.0;
foo = if impact then 1 else 2;
der(v) = if flying then -g else 0;
der(h) = v;
when {h <= 0.0 and v <= 0.0,impact} then
v_new = if edge(impact) then -e*pre(v) else 0;
flying = v_new > 0;
reinit(v, v_new);
end when;
when {sample(0, 1)} then
sendValue("127.0.0.1", 12345, h);
end when;
end BouncingBall;
================================
python
from OMPython import OMCSessionZMQ
omc = OMCSessionZMQ()
omc.sendExpression("loadFile(\"./BouncingBall.mo\")")
omc.sendExpression("simulate(BouncingBall, stopTime=3.0, outputFormat=\"csv\")")
## {
## 'resultFile': 'BouncingBall_res.csv',
## 'simulationOptions': "startTime = 0.0, stopTime = 3.0, numberOfIntervals = 500, tolerance = 1e-6, method = 'dassl',
## fileNamePrefix = 'BouncingBall', options = '', outputFormat = 'csv', variableFilter = '.*', cflags = '', simflags = ''",
## 'messages': 'LOG_SUCCESS | info | The initialization finished successfully without homotopy method.\n
## Message sent: 1.000000\n
## Message sent: 0.225060\n
## Message sent: 0.042434\n
## Message sent: 0.000000\n
## LOG_SUCCESS | info | The simulation finished successfully.\n',
## 'timeFrontend': 0.002844552,
## 'timeBackend': 0.005307907000000001,
## 'timeSimCode': 0.0059751560000000006,
## 'timeTemplates': 0.008850144,
## 'timeCompile': 1.118291402,
## 'timeSimulation': 0.018550764,
## 'timeTotal': 1.159920236
## }
## ===== Data received by getValue.py =====
## Listening on 127.0.0.1:12345
## Connected by ('127.0.0.1', 52362)
## Received 1.000000
## Connection closed by ('127.0.0.1', 52362)
## Connected by ('127.0.0.1', 52376)
## Received 0.225060
## Connection closed by ('127.0.0.1', 52376)
## Connected by ('127.0.0.1', 52386)
## Received 0.042434
## Connection closed by ('127.0.0.1', 52386)
## Connected by ('127.0.0.1', 52402)
## Received 0.000000
## Connection closed by ('127.0.0.1', 52402)
References
OpenModelica
https://openmodelica.org/
Acknowledgments
Daiphys is a professional-service company for research and development of leading-edge technologies in science and engineering.
Get started accelerating your business through our deep expertise in R&D with AI, quantum computing, and space development; please get in touch with Daiphys today!
Daiphys Technologies LLC - https://www.daiphys.com/